Tooldefinition
Simpel Værktøjs definition
Tasterækkefølge: [F2 Arm]—[F6 Aux.]—[F4 Tool.]―[F4 AutoCalc]
Fremgangsmåde:
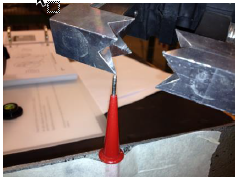
Monter et værktøj på robottens flange, og foretag en 4-punkts opmåling (4-point teaching), hvorefter robotten kan programmeres med aktuelle værktøjskoordinatsæt (Flange off-set).
På denne måde er det ikke nødvendigt at kende de nøjagtige værktøjsmål, og indtaste disse i robottens data hukommelse.
4 forskellige opmålinger mod det samme punkt:
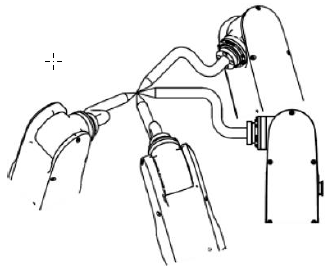
Under opmålingen er det vigtigt at de 4 positions-vinkler af hensyn til præcisionen, har størst mulig
variation.
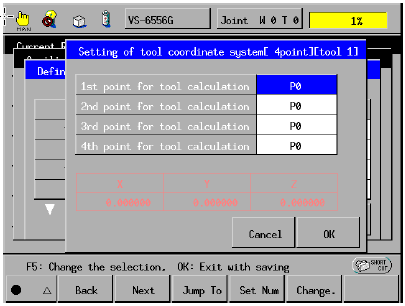
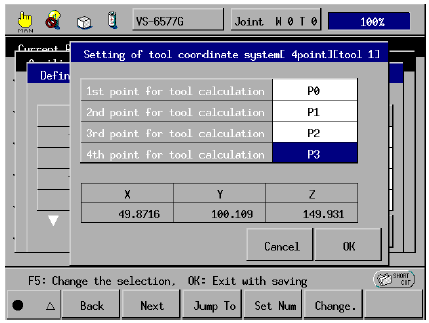
I nedenstående vindue indtastes de 4 opmålinger.
Først vælges værktøjsnummeret (f.eks. TOOL1) og derefter tastes [F5 Change.], efterfulgt af nummeret på den ønskede variabel. Fortsæt ved at taste på SHORTCUT tasten.
I ”Shortcut Menuen” tastes ”[F5] Var” og derefter [F4] Pos.
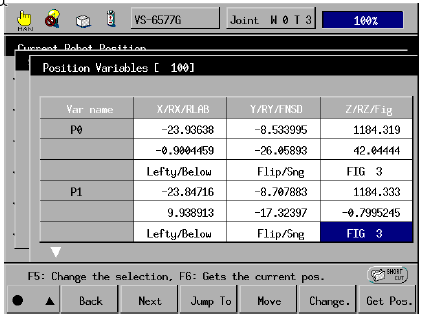
Position Variables vinduet fremkommer og ses herunder.
Vær opmærksom på at der ikke vælges en positions variabel som er brugt i forvejen.
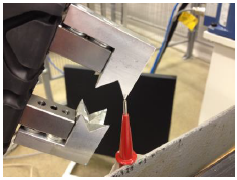
Opmål de 4 positioner, en for en og indlæs dem i datahukommelsen med [F6 Get Pos.].
Bemærk at motorene skal være indkoblet under forløbet.
Efter indlæsning af de 4 punkter tastes Cancel, for at returnere til Setting of tool coordinate system vinduet.
Ved siden at nummeret på positionen ses den beregnede værdi med sort skrift, som fremkommer ved opmålingen.
Bemærk: Hvis værdierne vises I pink, er opmålingen ikke foretaget korrekt og skal gentages med større variation og præcision.
Tast OK for endelig at gemme de beregnede værdier I Værktøjs definitions tabellen som vist tidligere.
I “Define Tool Coordinates” vinduet, tastes OK så de opmålte værdier gemmes.
Afprøvning af det definerede værktøjs definition
{GENERICO:type="Line"}Skift til operationsfunktionen “Tool” og vælg det opmålte værktøj.
Efterse at det opmålte værktøjs positions målepunkt ikke flytter sig, når rotations valg: Rx-Ry-Rz benyttes.
Hvis positionen på værktøjets målepunkt flytter sig væsentlig under denne afprøvning, skal værk-tøjet måles om.
Hvis en griber skal måles op, markeres et at ”kæbens” tænder, så man ikke fejlagtigt kommer til at måle forkert.
{GENERICO:type="fontawesome",icon="fa-star",size="fa-lg",layout="pull-left",color="darkblue"}OBS:
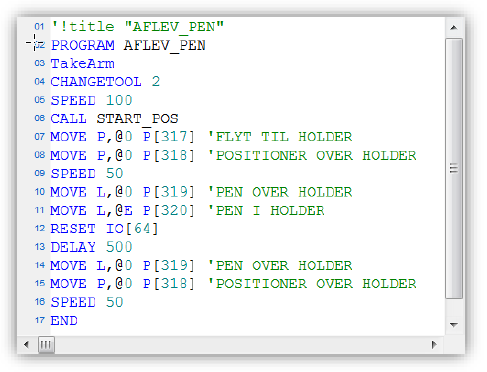
I programmer vil ”TAKEARM” kommandoen indstille robotten til værktøj 0.
Værktøjet kan ændres med kommandoen ”CHANGETOOL 2”. Tallet 2 er det opmålte værktøj.
Eksempel: