koordinatsystemer generelt
Alle positioner ( p1, p2, osv. ) i et robotprogram er gemt i rektangulære
koordinater ( X, Y, Z, værdier )
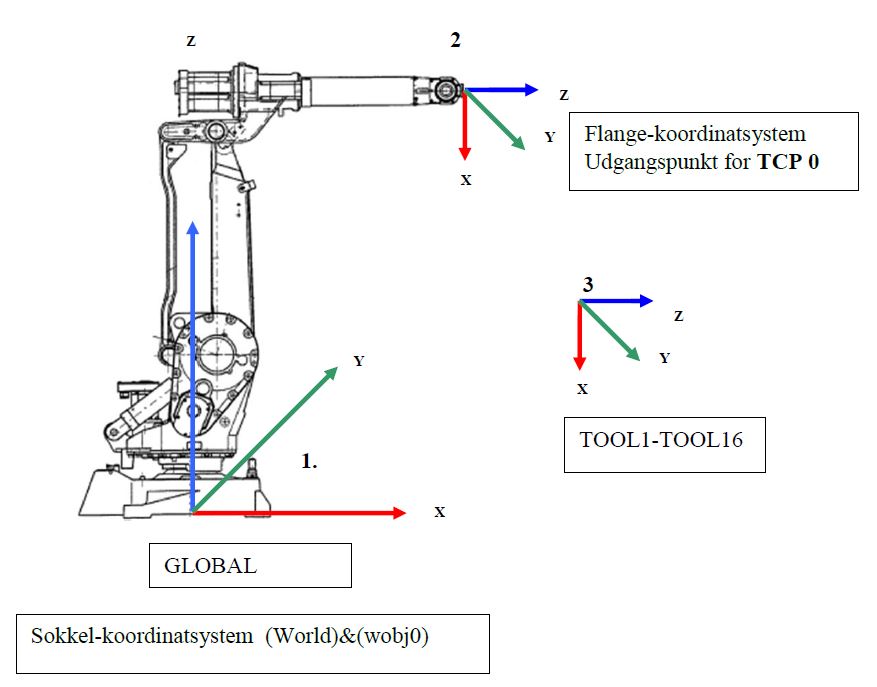
Dette koordinatsystem er forbundet med andre koordinatsystemer sådan at forstå at en position på et emne, refererer via værktøjs- og Flangekoordinatsystemet ned til sokkelko-ordinatsystemet.
3. Værktøjs-koordinatsystem er defineret i VIS/VIEW-DATA TYPES-TOOLDATA
2. Flange-koordinatsystemet ligger fast og er ”indbygget” i robotten, det er placeret i systemprogramet BASE.
1. Sokkel-koordinatsystemet ligger ligeledes fast, det er placeret i systemprogramet BASE.
Senest ændret: Friday den 20. October 2017, 07:48