Robottyper
Robot typer
Inddeling efter mekanisk struktur
- Lineære / kartesiske robotter
- SCARA robotter ( ? )
- Artikulerede / Roterende robotter
- Parallelle robotter (delta)
- Cylindriske robotter
- Andre
- Ikke klassificeret
Her er nogle yderligere forklaringer og definitioner på de forskellige klassifikationer af typer af robotter.
Antallet af akser og bevægeligheden skal forstås som den
grundlæggende
funktion/konfiguration robotten blev leveret med af producenten, og ikke med
akser tilføjet af brugeren på et senere tidspunkt.
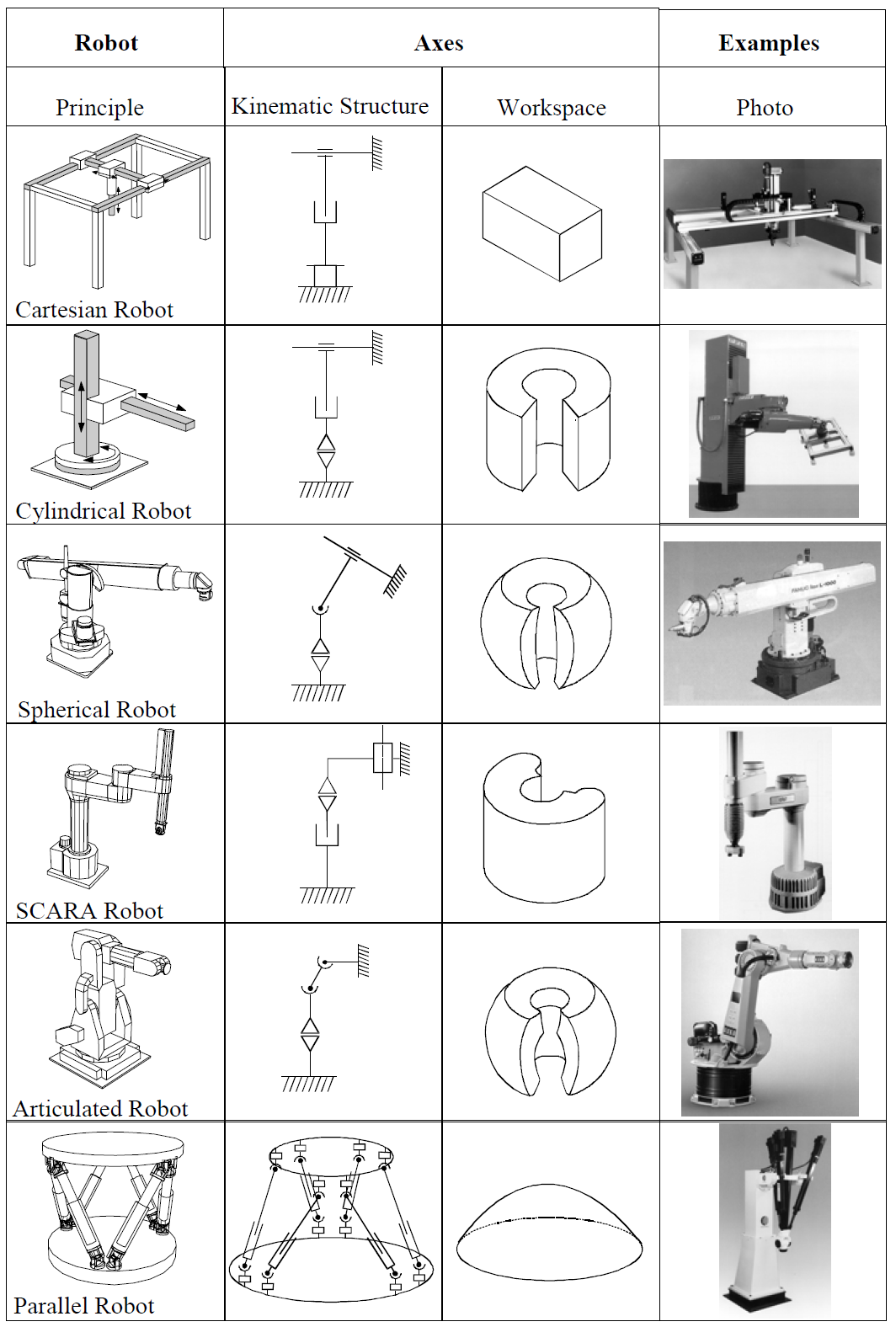
Robotter fordelt på mekanisk struktur er baseret på følgende definitioner
· Lineær robot: en robot, hvis arm har tre lineære led og hvis akser er sammenfaldende med et retvinklet (kartesisk) koordinatsystem
· SCARA robot: en robot, som har to parallelle roterende led for at sikre ensartet bevægelse i et plan
· Artikuleret robot: en robot, hvis arm har mindst tre roterende led
· Parallel robot: en robot, hvis arme har samtidige lineære eller roterende led
· Cylindrisk robot: en robot, hvis arm har en roterende og to lineære led og hvis akser danner et cylindrisk koordinatsystem
Dette er klassificeringen som den er beskrevet af
International Federation of Robotics (IFR). De er vist i efterfølgende figur
som Kartesisk, Cylindrisk, Scara, Artikuleret og Parallel.
De dækker over fem forskellige rækkevidde områder.
Figuren har seks billeder, men man kan se at Sfærisk- har samme område som Artikuleret-robot.